Geometric algorithms involve questions that would be simple to solve by a human looking at a chart, but are complex because there needs to be an automated process.
One example is: given four points on a 2-dimensional plane, and the first three of the points create a triangle, determine if the fourth point lies inside or outside the triangle.
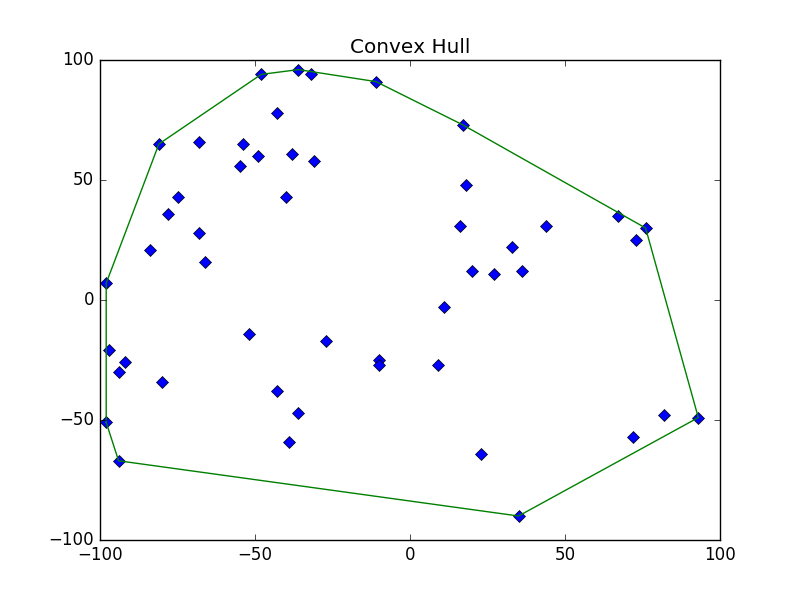
Another geometric problem is: given a number of points on a 2-dimensional plane, compute the minimum number of boundary points, that if connected, would contain all the points without creating a concave angle.
Here is one of the solutions I generated in Python:
So how do you do it?
I got a clue from a lecture. It involves using a point as a pivot and determining which of two other points are the most clockwise from each other.
Before I watched more of the lecture, I was determined to figure out an algorithm that would solve it in a reasonable amount of time.
My idea was:
- sort the points from left to right (least value of x to largest) - O(n log n) where n is the number of (x, y) points
- starting with the leftmost point p:
- go through each point to the right of that point, and using p as a pivot, find which point is the most clockwise. O(n)
- set the most clockwise point as the new p - O(1)
- loop again with new p
- this continues until the starting point is reached O(h) - where h is the number of hull points
In order to “prematurely optimize” (I know it’s bad) I was trying to make the all the comparisons only on points to the right of p, but then I would need to flip and go the other way once the max x value was reached.
It was turning out to be way more complicated than it should be. I was trying to get it from O(n2) down to O(n log n) but really all my optimizations were just making it O((n log n) + (n * h)).
I ended up cleaning it up and just getting the algorithm where it was correct, not fast. Then once it was correct, I would make it faster.
So I tore out a bunch of code and just got it working. And it worked beautifully.
I got rid of all the code that figured out if comparison points were to the right of the pivot point. They didn’t help improve the complexity.
I was able to remove the sort, also. It wasn’t needed. I could find my start point, the minimum x-value point, in linear time. It didn’t matter what order the comparison points were in, since I was keeping track of the maximum clockwise-dness as I went along, the same as a linear search for the maximum value in an unsorted array.
This was the new way:
- Find the minimum x-value point, the initial point p - O(n)
- Using p as a pivot:
- find which other point is the most clockwise - O(n)
- set it as new p - O(1)
I ended up with h pivot points, each comparing its n neighbors to the one with the maximum clockwise angle.
This is O(n * h).
So I watched the rest of the lecture and it turns out my algorithm was one of the 2 solutions. It’s called the Jarvis march, aka “the gift-wrapping algorithm”, published in 1973.
from collections import namedtuple
import matplotlib.pyplot as plt
import random
Point = namedtuple('Point', 'x y')
class ConvexHull(object):
_points = []
_hull_points = []
def __init__(self):
pass
def add(self, point):
self._points.append(point)
def _get_orientation(self, origin, p1, p2):
'''
Returns the orientation of the Point p1 with regards to Point p2 using origin.
Negative if p1 is clockwise of p2.
:param p1:
:param p2:
:return: integer
'''
difference = (
((p2.x - origin.x) * (p1.y - origin.y))
- ((p1.x - origin.x) * (p2.y - origin.y))
)
return difference
def compute_hull(self):
'''
Computes the points that make up the convex hull.
:return:
'''
points = self._points
# get leftmost point
start = points[0]
min_x = start.x
for p in points[1:]:
if p.x < min_x:
min_x = p.x
start = p
point = start
self._hull_points.append(start)
far_point = None
while far_point is not start:
# get the first point (initial max) to use to compare with others
p1 = None
for p in points:
if p is point:
continue
else:
p1 = p
break
far_point = p1
for p2 in points:
# ensure we aren't comparing to self or pivot point
if p2 is point or p2 is p1:
continue
else:
direction = self._get_orientation(point, far_point, p2)
if direction > 0:
far_point = p2
self._hull_points.append(far_point)
point = far_point
def get_hull_points(self):
if self._points and not self._hull_points:
self.compute_hull()
return self._hull_points
def display(self):
# all points
x = [p.x for p in self._points]
y = [p.y for p in self._points]
plt.plot(x, y, marker='D', linestyle='None')
# hull points
hx = [p.x for p in self._hull_points]
hy = [p.y for p in self._hull_points]
plt.plot(hx, hy)
plt.title('Convex Hull')
plt.show()
def main():
ch = ConvexHull()
for _ in range(50):
ch.add(Point(random.randint(-100, 100), random.randint(-100, 100)))
print("Points on hull:", ch.get_hull_points())
ch.display()
if __name__ == '__main__':
main()
The other algorithm, at O(n log n), uses a sort and then a simple single pass of all the points, and making only left turns as it goes around the perimeter counter-clockwise. When the next point is a right turn, it backtracks past all points (using a stack and popping points off) until that turn turns into a left turn. This algorithm is called the Graham scan.
Which algorithm is better? It depends on your points. If most of the points will lie on the hull, the n log n algorithm will be better. If you have relatively few hull points bounding most of the points, the n*h will be better. You could always plot a random sample of the points on a graph and then choose your algorithm from there. I think most points that resemble randomness will benefit from the Jarvis march.
